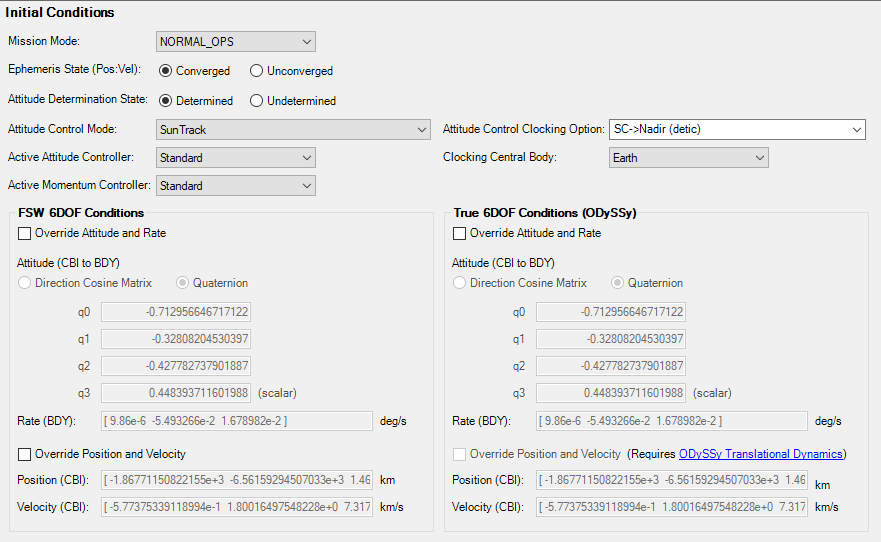
Initial Conditions
Use the Initial Conditions page to specify the initial orientation, body frame rotation rate, and position and velocity in inertial space of the simulated spacecraft.
Initial spacecraft state
At the top of the Initial Conditions page, you can define parameters related to the spacecraft's initial state:
| Parameter | Description |
|---|---|
| Mission Mode | You can set an initial spacecraft Mission Mode, based on the mission modes defined in the Mass/Propellant/Vehicle State page. |
| FSW Ephemeris State | You have the option to start a simulation in a converged on unconverged ephemeris state. An unconverged ephemeris state will block the spacecraft from starting in a Tracking Mode (automatically changed to Idle mode). |
| FSW Attitude State | You can set the initial attitude state to determined or undetermined. Undetermined attitude states allow initial Tracking Modes, but are likely to have large initial pointing errors. |
Setting the Initial Conditions
This section goes over setting the initial orientation and rotation rates of the spacecraft with a way to manually override its position and velocity.
Attitude Control Mode

This first method is done by selecting the
- FSW Attitude Control Mode
- The control mode list is generated from the modes defined in the Mode Controller page.
- Attitude Control Clocking Option
- The clocking option is available in most cases, pending which control mode was selected.
- Some clocking options also enable you to set a clocking central body. This is the body that the clocking option is relative to.
While the spacecraft aligns the pointing vector according to the control mode, it will also attempt to point the clocking vector as close to the Clocking Option as possible.
After the control modes and clocking options have been selected, SOLIS will automatically compute the appropriate attitude quaternion and body rates.
Active Controllers
The Active Attitude Controller and Active Momentum Controller options will only be available on this page if PIID Control is selected on the Attitude Control System page. Use the dropdown menus to select the desired controllers to start the simulation with.
User-Specified Orientation and Rates
You also have the option to provide manual input by selecting the Override Attitude and Rate checkboxes. In this section, you can set different values for the FSW and True conditions.
- FSW conditions are used within the flight software computations.
- Truth values are used in ODySSy to propagate the true state forward in time.
- Any differences between the two will result in control errors, which can be used to replicate realistic mission scenarios.
See the table below for information about orientation and rate input options.
| Parameter/Control | Description | Units |
|---|---|---|
| Initial Attitude (inertial (CBI) to spacecraft (BDY)) | User-specified inertial frame to spacecraft body frame rotation of the simulated spacecraft. Can be specified using either a direction cosine matrix or a quaternion. | N/A |
| Direction Cosine Matrix | User-specified 3x3 matrix representing the true-of-date inertial frame to spacecraft body frame rotation at the beginning of a SOLIS run. Direction cosine matrices (DCMs), also called euler angles, represent a rotation between two coordinate frames, a 3x3 matrix. Each column of a DCM must be of unit length (having a 2-norm equal to 1). The first column represents the spacecraft body frame unit vector that is initially aligned with the inertial frame X-axis, the second column represents the body frame unit vector that is initially aligned with the inertial frame Y-axis, and the third column represents the body frame unit vector that is initially aligned with the inertial frame Z-axis. | N/A |
| Quaternion | User-specified 4x1 vector representing the true-of-date inertial frame to spacecraft body frame rotation at the beginning of a SOLIS run. Quaternions contain four elements that are derived from a three element rotation axis and a scalar rotation angle about that axis. Quaternions must be of unit length (having a 2-norm equal to 1). | N/A |
| Initial Attitude Rate | User-specified 3x1 vector representing the spacecraft body frame rotation rate at the beginning of a SOLIS run. Default values are 0 degrees per second about all three body axes. | deg/s |
Position and Velocity Overrides
You can also override the automatically generated satellite positions and velocities that come from STK. Check the box and input 3x1 vectors representing the desired position and velocity in the inertial CBI frame. Again, you have the option to provide different values for the FSW and Truth which are given to the flight software and ODySSy systems respectively.